The axiiio Story
Axiiio started as a DIY project, by Founder Adam Liwszyc, to counter the outrageous cost of remote follow focus units.
DIY Follow Focus
In 2012 Adam was filming scenes with digital SLR's and steady-cams but wanted better control of depth of field. He needed a focusing system that was a part of the steady-cam rig, but was controlled either by the operator via a thumb wheel, or remotely by a second operator. This would allow filming using close up portrait lenses with a low aperture setting to get close to subjects while they moved around.
I almost fell off my chair when I got some prices for remote follow focus systems. Buying them was like the cost of a new small car and hiring them meant 1000's of dollars of dead cost, so I thought I should just build one.
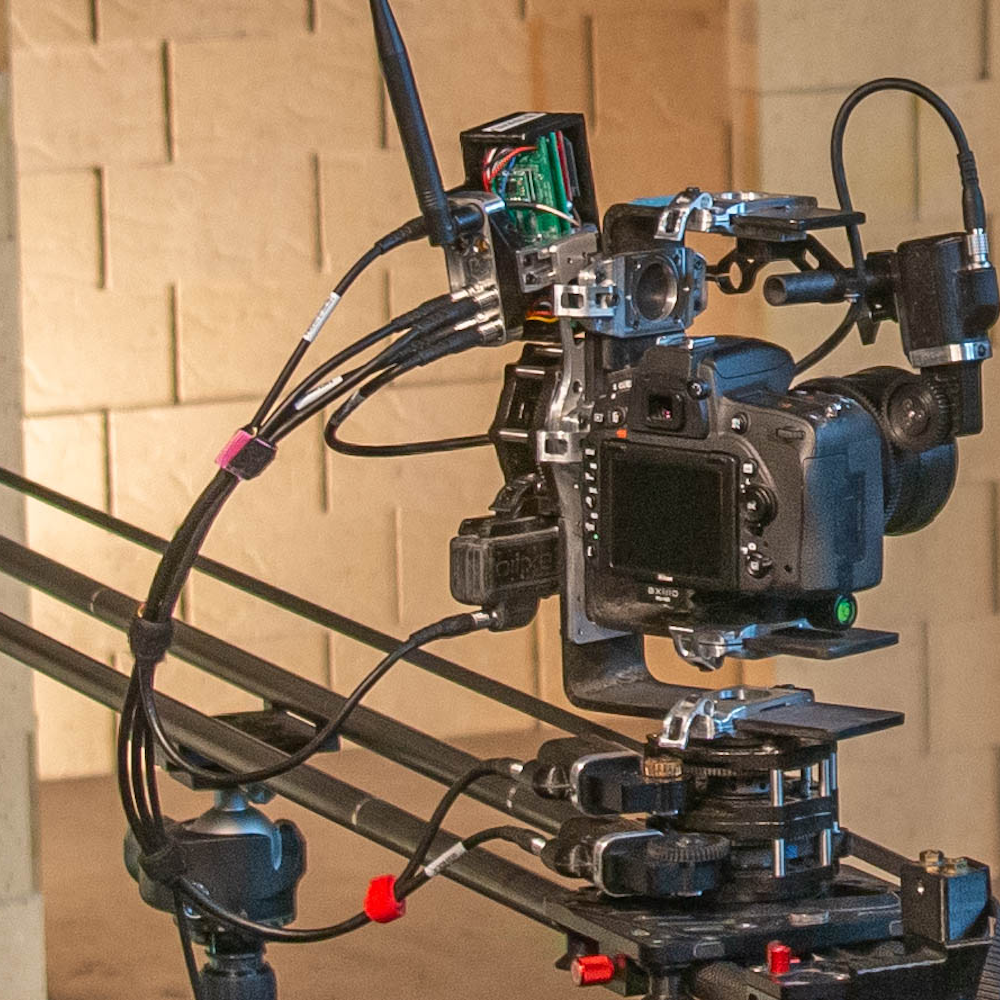
Knocked together from a simple micro processor prototyping board with a wireless transceiver and parts from Spark Fun and Pololu, it worked really well.
It didn't take long to realise, the inexpensive digital servo motor for the follow focus unit, and some clever closed loop control technology, could also be used to provide motion as well. The low cost would make it accessible to anyone.
Camera Control
At roughly the same time as this revelation another practical problem was surfacing for Adam with cameras mounted on gyro stabilised rigs.
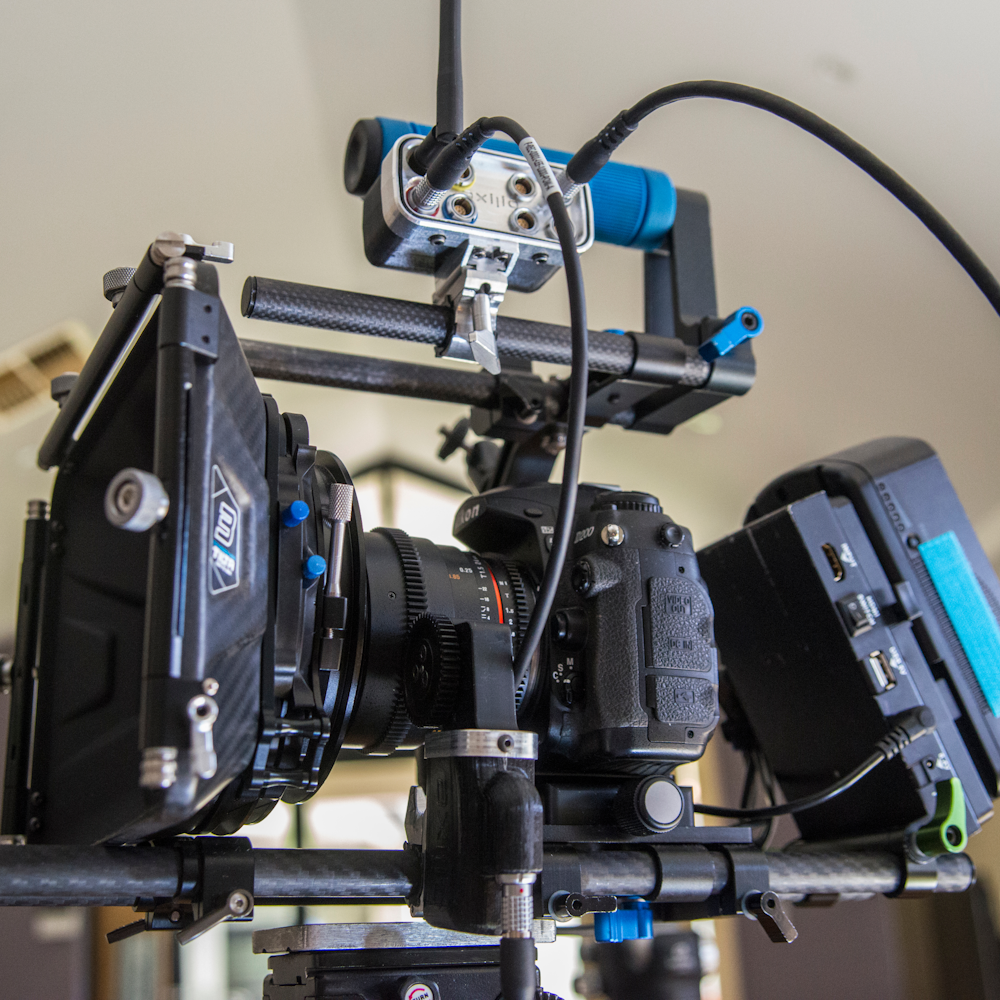
The problem with putting your camera on either a steady-cam rig or an electronically stabilised one is that it's really difficult to change camera parameters once everything is set up and your ready to go. It's easier with steady-cam, but nigh on impossible with a gyro-stabilised rig, unless you turn it off - which was what I ended up doing most of the time. Anyone who's dealt with this knows what I mean because its a P in the A! So I started experimenting with the possibility of remotely changing camera parameters from an iPhone so you didn't have to touch the rig if it was balanced and set up.
Now the idea grew into something even more ambitious. Combine smartphone remote camera control with a motion system capable of controlling not only the digital servo's developed for the remote follow focus system, but also tilt and pan on the new breed of gyro stabilised rigs.
At this stage Adam had already built 2 hardware controlled prototypes for remote follow focus duties. They had a lot of cool technology built into them all of which could be ported easily into a universal system that was smartphone controlled. Ditching the hardware controller, and using smartphone technology opened up a range of possibilities that would be difficult to achieve with the current design, without adding huge cost to the final product.
A Universal Motion System
So the decision to move forward with a universal motion system that was capable of controlling multiple digital servo motors for both camera motion and lens control, outputting commands to a connected camera to change parameters within the camera and capable of interfacing with the latest gyro stabilised camera rigs.
Adam began experimenting with ideas on how you could do this and ran into the first big problem. Torque.
In order for the system to be able to pull focus AND move the significantly higher loads expected from a camera robot, you need to be able to change the gear ratio to give you more torque when you need it. Just like a gearbox in a car. All other systems get around this problem by using different motor gearbox combinations for each axis and making the whole assembly replaceable OR using really large motors.
Making different motors / gearbox combinations for each task made the whole concept of a universal motor not work, and sizing the motor to make it do everything would have made it very large and heavy.
His solution was simpler, use the same motor and basic gearbox for every task and make an intermediate gear stage that was changeable: the motion pancake was born.
After an initial period of experimentation and calculation, it seemed like this would work for a universal system. It was time to get serious with the engineering design of what was to become axiiio.
Design and Engineering Goals
In order for the project to take shape, it needed some design and engineering goals. Investigating the market revealed a need for something that was lightweight, portable and simple to use. It needed to be able to run off batteries and have as few components as possible.
Axiiio's original design goals were:
- Tool-less setup. Creators should spend more time producing shots rather than getting ready to. Eliminating the tool requirement is a big time-saver.
- Use standard rail and quick release systems. Should be able to interface with existing standard rail systems and quick release systems.
- Use industry standard connectors. Uses high quality metal industry standard connectors throughout.
- Low power. Able to run off batteries, or power supply
- 4 Axis control, minimum. Able to drive 4 continuous rotation digital servo motors using closed loop technology.
- Gyro-stabiliser control ready. Able to drive at least 2 additional servo motors using standard RC PPM signals for gyro-stabilised systems.
- Remote camera control. Capable of controlling cameras via an inbuilt USB host.
- Extremely low weight. The whole system including leads, receiver, pancakes, motors and brackets, needed to weigh less that 3 KG (6.5 pounds).
- Compact. The whole system needed to fit into a box no larger than 300 x 250 x 150 (12in x 10in x 6in).
- Must be able to move a 10KG payload (22 pounds).
- Have no structural plastic parts.
- Inexpensive. Do all of this and ensure that a single axis starter system was under US$1000 for a kickstarter campaign.
Each of these goals represented a unique challenge to the project. Not least of which was the size and weight constraints.
Experimentation and Manufacturing
Axiiio should be the lightest, smallest, most-flexible, professional-quality motion control rig available in the world. To achieve this was going to require some serious weight busting engineering, using aerospace materials and design techniques.
Nothing beats testing actual parts, no matter how much time you spend calculating and modelling how things should react to loads, you always get a couple of curve balls that knock you back. Some of them are purely engineering related - things you missed or omitted, but some of them are tactile, design issues related to how the object feels when you use it or how it looks when it's performing tasks.
One of the worst things that can happen on a complex multi faceted project like axiiio, is finding out you have a problem from customers. Being able to make prototype parts in house, really focuses you on the issues, not just with how the product reacts and feels, but also on it's manufacturability.
The purchase of a small 3 axis milling machine, enabled many iterations of components to be tested far faster than if the machining of these components was outsourced. Another important part of the prototyping mix was having a 3D printer to test parts before they were machined or expensive moulds were made for parts.
The Result
6 years of manufacturing and testing followed, accompanied by software development. The result is a group of simple components that can be reconfigured to build different types of motion rigs for photographic and filmmaking tasks. Flexibility means a system that's able to be changed on the fly. It means small, lightweight and portable. It also means simple to set up and configure.
The axiiio nano receiver is very small and lightweight because carbon fibre is used extensively in its construction. At just 110 g or 3.9 ounces, the axiiio nano receiver is the smallest and lightest multifunction motion controller ever devised. It uses high-quality metal connectors and has an external antenna for reliable connectivity.
The axiiio nano motors are custom-designed and crafted in-house to be light, powerful and responsive; they're a core component of the system. Carbon fibre and aircraft grade aluminium is used to reduce the weight of these motors down to just 160g or about 5.6 ounces. An axiiio nano motor can perform fine lens control, but also move an entire camera rig through space. Each nano receiver can control up to 4 motors making it a four-axis control system.
The final component in the axiiio nano system is the nano pancake. It's a deceptively simple device, which allows the nano motors to control camera motion.
By simply swapping gears in the motor, the pancake can control a wide variety of different types of motion axes because the motor has been designed from scratch to do this. When combined with our nanoLoop technology and the mobile ProMoCo app, a wide array of control possibilities opens up.
Axiiio isn't just another motion control robot. It's a system. With components that give you control over all the creative possibilities you can imagine. How you use it is defined not by rules and convention, but by you, and we believe that's what filmmaking should be.